 天津智易时代科技发展有限公司
天津智易时代科技发展有限公司
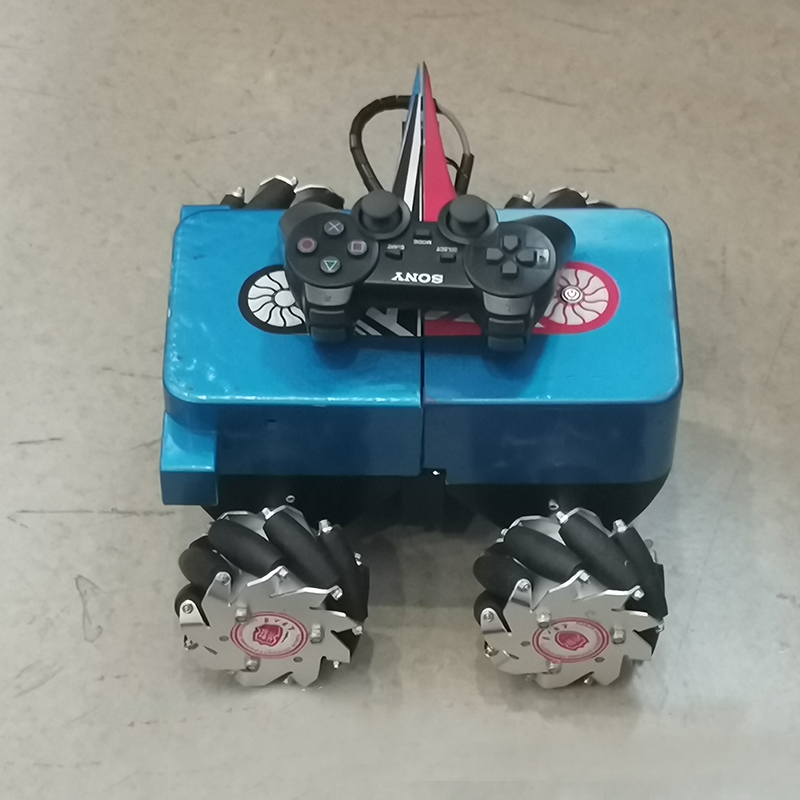
双体车蛇复合变结构机器人
该机器人创新性地设计了特殊的连杆结构,通过精确的机械联动机制,配合高性能数字舵机和麦克纳姆轮,实现了车形与蛇形两种姿态的自由、无缝切换。在开阔地带,双体机器人采用车形姿态,凭借麦克纳姆轮的多方位移动能力,能够高速、高效地覆盖大范围区域;而在狭窄、复杂的弯形通道中,切换到蛇形姿态,利用连杆结构的柔性变形和多关节协调,轻松穿越障碍物密集的环境,大幅提升通行效率。
本产品凭借其灵活性、环境适应性和多功能集成特点,车蛇复合变结构机器人未来在密集管网检测、大型装备内部检修等细分领域具有广阔应用前景,有望实现规模化部署,提升工业检测精度和维护安全性,同时探索在灾害救援、侦察等场景的潜在应用。

上一篇: 农业喷药机器人
下一篇: 智易时代水果采摘机器人
相关推荐





您好!请登录