 天津智易时代科技发展有限公司
天津智易时代科技发展有限公司
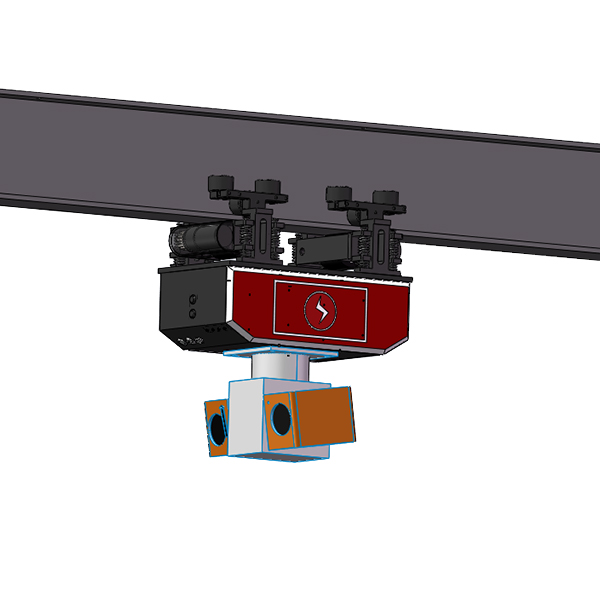

挂轨式防爆智能巡检机器人,是针对防爆场景研发的、具备自主行走、自主定位、自主充 电等功能的全自动化智能产品,可协助完成场景内所需的各类日常巡检。机器人系统包括机器人、驱动单元、供电单元、通讯单元、轨道单元,机器人携带可见光摄像机、红外热成像仪、 环境监测传感器、气体监测传感器等模块,精准收集测量现场各类信息。后台系统包括巡检任务管理模块、存储模块、图像处理模块、图像显示模块、查询模块和报警模块。巡检机器人的动力驱动由机器人上的大容量锂电池组提供,通过部署在输煤区域中的分布式充电桩实现自动充电。

产品介绍
主要由控制机构、运动机构、气体监测模块、视觉模块、运动避让模块,前端监控设备等核心设备和其他辅助设备组成。
控制器选择性能稳定、处理能力强的工业级 PLC控制器。控制器具备丰富的输入输出接口,能够与传感器、执行器和通信模块等进行可靠的连接。
运动控制采用先进的运动控制算法,如 PID 控制、模糊控制或神经网络控制等,实现机器人在轨道上的精确运动和定位。运动控制系统应能够根据传感器反馈的信息,实时调整机器人的速度、加速度和转向等参数,以适应不同的巡检环境和任务需求。配备可靠的通信模块,以便机器人与监控中心或平板设备进行数据传输和通信。
能够检测多种气体,包括但不限于一氧化碳(CO)、二氧化碳(CO₂)、硫化氢(H₂S)、甲烷(CH₄)、氧气(O₂)等,量程可选。采用先进的传感器技术,具有较高的检测精度。可以实时获取气体浓度数据。这些数据能够通过通信模块及时传输到监控中心或机器人的控制系统。这样,操作人员就可以在第一时间了解环境中的气体状况,以便及时采取措施。当检测到的气体浓度超过预设的安全阈值时,会自动触发报警。报警方式可以是声光报警,即发出响亮的警报声和闪烁的警示灯,也可以向远程监控平台发送报警信号。
视觉模块配备双光谱网络摄像机,用于对巡检环境和设备进行视觉监测。摄像头具备高分辨率、低照度和宽动态范围等性能,以便在不同的光照条件下获取清晰的图像。同时配备图像识别和处理算法,对设备的外观、标识和状态等进行自动识别和分析。
系统功能
日常巡检
遥视巡检
多级监控
无盲角监控
运行模式
检测功能
应用优势
提升巡检效率与精度
降低安全风险
节约人力成本
相关推荐





您好!请登录