 天津智易时代科技发展有限公司
天津智易时代科技发展有限公司高炉风口防爆巡检机器人技术方案
项 目 概 述
01/项目背景
高炉风口作为炼铁核心部件,长期承受高温、高粉尘等工况,传统人工巡检存在安全隐患大、效率低等问题。随着钢铁行业智能化转型加速,高炉风口智能防爆巡检机器人成为保障生产安全、优化工艺参数、降低运维成本的重要技术手段。

02/建设目标
部署智能巡检系统实现风口数字化管理,每2小时完成26个风口循环检测,实时上传温度、喷煤、洇水等数据及图像,自动返回充电。作业涵盖吹管测温、漏煤检测、洇水监测等功能,通过数据分析生成报表,降低人工风险,提升智能化水平。

安全目标:替代人工进入高危区域,实现“零接触”巡检。
效率目标:巡检效率提升6倍,数据采集密度增加10倍。
经济目标:替代高危岗位,可减少高炉风口区域配管及运维人员,风口寿命延长,高炉年减少非计划休风时间。
技术目标:构建风口数字孪生体,为智能炼铁提供关键数据支撑,推动操作模式从”经验驱动”向”数据驱动”转型,故障预警准确率≥95%。
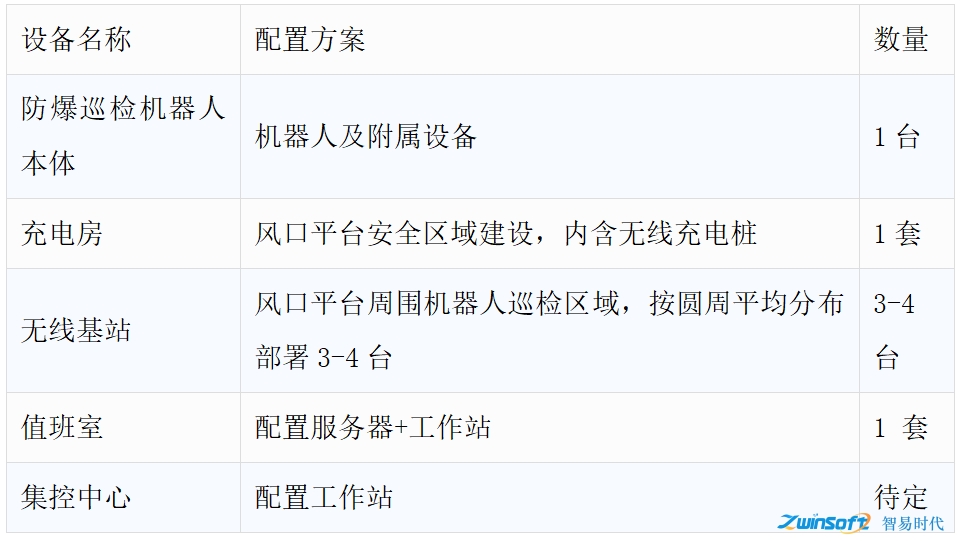
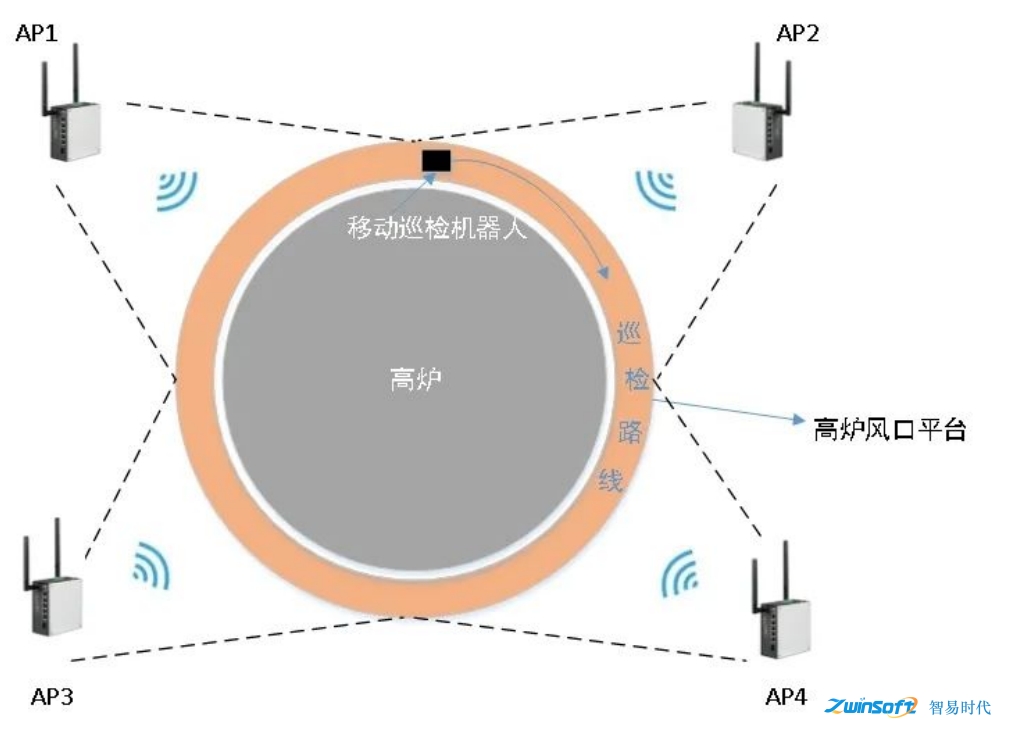
03/建设内容
系统由防爆巡检机器人、充电房、通信系统、上位机平台构成。部署3-4个AP建立无线覆盖,机器人通过无线传输数据。充电房设于安全区域,支持自动回充。
建 设 方 案
01/方案概述
防爆机器人配备激光雷达、双光谱云台(含热成像)、环境监测等模块,具备防爆隔热特性。应用激光SLAM导航和AI图像分析技术,实现温度场监测、缺陷识别、气体检测等核心功能。

自主导航与精准定位:采用激光SLAM、IMU、里程计融合定位技术,实现在高炉风口平台狭窄空间内的厘米级路径规划。
智能避障:搭载多维超声波传感器结合激光传感器实现多角度障碍物检查,实现复杂钢结构环境种自主避障。
多维度状态感知:集成红外热成像仪(监测风口表面温度场分布)、高清工业相机(捕捉洇水、裂纹、喷煤粉等可见缺陷)、气体传感器(检测CO泄漏)等多源传感器。
实时数据分析与预警:通过边缘计算设备实现温度异常阈值判定、图像缺陷识别(基于深度学习模型),将处理结果实时传输至中控系统。
自主充电与持久续航:配备快充电池组与自动对接无线充电桩,单次充电可满足8小时连续工作,并且机器人自身实现自动检测电量,可根据设定充电电量自主返回充电房充电,满足全天候巡检需求。
智能语音控制:通过指定唤醒词可与机器人互动,并指定临时巡检任务。
02/系统组成
⭐机器人本体⭐
集成激光雷达、双光谱云台、环境传感器等设备,具备防爆资质。采用AI图像分析技术实现安全隐患全面监测。
⭐充电单元⭐
配备碳酸铁锂电池和防爆无线充电桩,支持二维码精准定位(±2cm),含防撞保护装置。电量低于阈值自动返充,支持交流220V输入。
⭐通信网络⭐
通过AP组建无线局域网,实现巡检数据实时回传。
03/系统功能
具备视频监控、红外测温(含热力图分析)、环境监测(温湿度/CO)、语音对讲、自动巡检(全面巡检、例行巡检、专项巡检、特殊巡检、自定义巡检及人工控制巡检等6种模式)、人工遥控检查、巡检报告生成(支持历史数据回溯)、智能告警(巡检对象告警、环境告警、系统告警、综合告警等)、机器人自检、自主避障等功能。
工作模式:预设2小时全风口循环检测,异常时可人工介入指定点位复查,任务完成后自动续检。





您好!请登录